

















 293 / 1278
293 / 1278

Products designed for industrial applications.
General terms and conditions for sale are available on
www.camozzi.com.1
Series CGPT self-centering parallel grippers with T-guide
MOVEMENT >
CATALOGUE
>
Release 8.8
/7.17.09
1
MOVEMENT
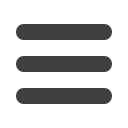
The total gripping force has to be calculated as follows:
Total Fc = Fc x 2
Gripping force in relation to the lever arm (R)
and the eccentricity (b, e)
R = √ (b² + e²)
CGPT-16
R = lever arm
Fc = closing gripping force
Fa (opening gripping force) = Fc + 10%
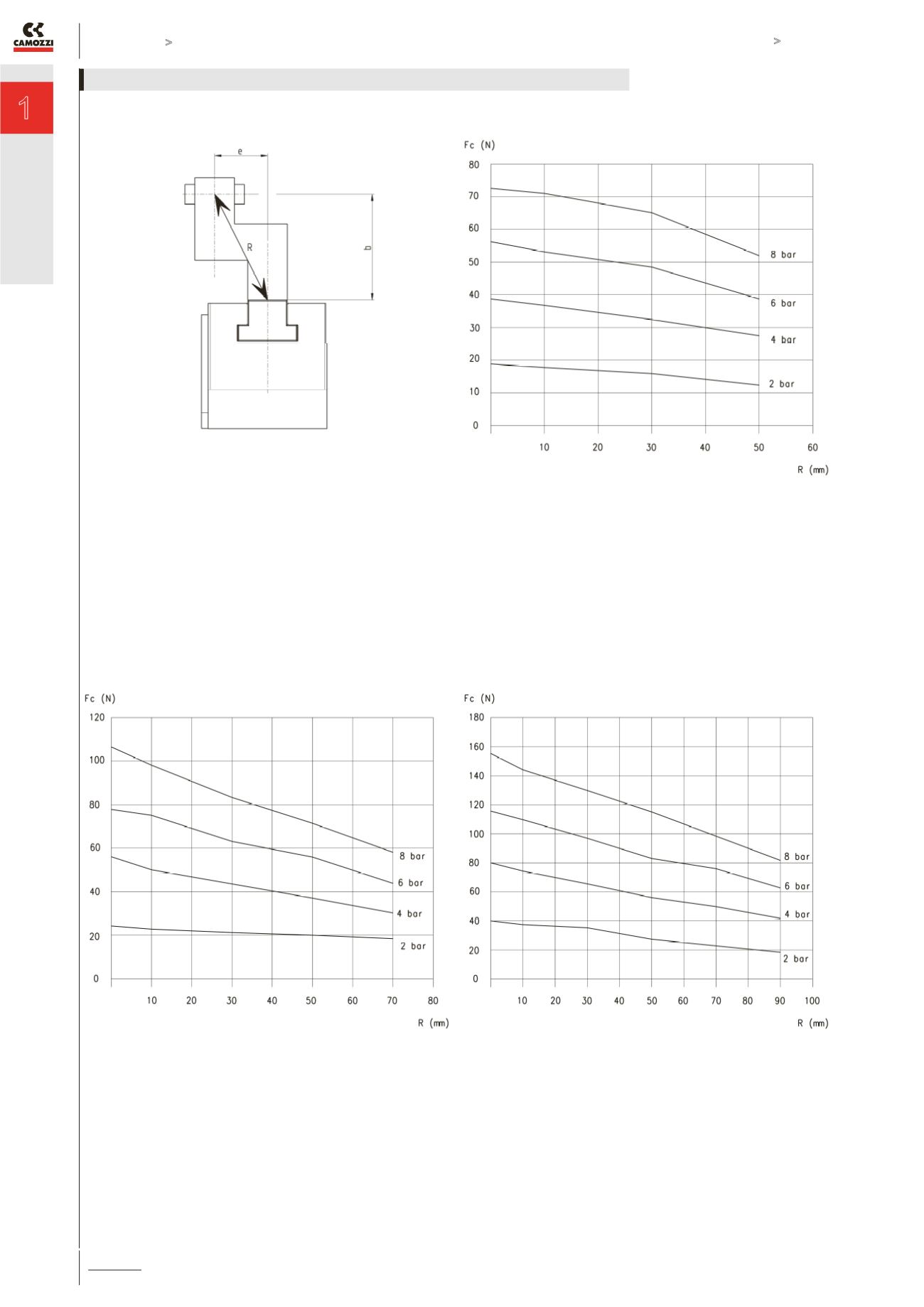
GRIPPING FORCE (Fc) PER SINGLE JAW
CGPT-20
R = lever arm
Fc = closing gripping force
Fa (opening gripping force) = Fc + 10%
CGPT-25
R = lever arm
Fc = closing gripping force
Fa (opening gripping force) = Fc + 10%