

















 376 / 1280
376 / 1280

Prodotti destinati all’industria.
Condizioni generali di vendita disponibili sul sito
www.camozzi.com.Sensori Serie CST-CSV-CSH-CSB-CSC-CSD
CATALOGO
1
/9.05.17
1
>
Release 8.8
MOVIMENTO >
MOVIMENTO
CORSA DI CONTATTO E ISTERESI - impiego corretto dei sensori magnetici
I sensori magnetici sono costituiti da un interruttore lamellare racchiuso in
un’ampolla di vetro contenente un gas rarefatto. Le lamelle (o contatti) costruite in
materiale magnetico (ferro nichel) sono flessibili e rivestite nei punti di contatto con
materiali pregiati antiarco. La commutazione avviene mediante un opportuno campo
magnetico e il loro azionamento si realizza per mezzo del magnete permanente
contenuto nel pistone.
NB: LA PRESENZA DI MASSE FERROSE VICINO AL CILINDRO O ALLE
PINZE (COME VITI E PIASTRE DI FISSAGGIO DI FERRO) PUO’ MODIFICARE
CONSIDEREVOLMENTE LA DIREZIONE E LA POTENZA DEL CAMPO
MAGNETICO.
I sensori Reed sono del tipo normalmente aperto, perciò, quando sono sottoposti
all’azione del campo magnetico, chiudono il circuito.
Serie
Ø
b ( mm )
H ( mm )
24-25
16
9.2
1.2
24-25
20
12
1
24-25
25
11.7
1.1
27
20
10.5
1.6
27
25
10.9
1.6
27
32
10.7
1.1
27
40
12.1
1.7
27
50
12.1
1.2
27
63
14.1
1.3
QP
12
10
1.3
QP
16
11.8
1.5
QP
20
11.1
1.6
QP
25
10.6
1.6
QP
32
12.7
1.2
QP
40
12.5
1.1
QP
50
15.4
1.6
QP
63
16.7
1.5
QP
80
13.2
1.7
QP
100
16.8
1.8
31-32-ST 12
9.2
1.4
31-32-ST 16
7.9
1.3
31-32-ST 20
9.1
1.5
31-32-ST 25
10.6
1.5
31-32-ST 32
11.9
1.7
31-32-ST 40
12.9
2.2
31-32-ST 50
14.7
1.2
31-32-ST 63
15.2
1.4
31-32-ST 80
16.6
1.8
31-32-ST 100
16,8
1,7
40
160
24
2
40
200
26
2
Serie
Ø
b ( mm )
H ( mm )
60
32
9.9
1
60
40
8.9
1.2
60
50
10.7
1
60
63
12.9
1.2
60
80
11.5
1.4
60
100
14.9
1.4
60
125
22
1
61
32
9
1
61
40
9.3
1.3
61
50
11
1.6
61
63
13.4
1.3
61
80
13.2
1.6
61
100
15.2
1.7
61
125
22.1
1.3
42
32
10.8
1.5
42
40
11.2
1.6
42
50
12.6
1.7
42
63
14.1
1.7
QCT
20
10
1.7
QCT
25
11.4
1.8
QCT
32
12.1
1.8
QCT
40
12.4
1.8
QCT
50
13.7
1.9
QCT
63
13.5
1.8
69
32
34.5
3.8
69
40
29.6
4.1
69
50
31.5
4.6
69
63
32.3
3.1
69
80
24
2.9
69
100
25.6
2.9
69
125
30.1
1.7
Serie
Ø
b ( mm )
H ( mm )
62-63-6PF 32
10
1
62-63-6PF 40
11
1
62-63-6PF 50
12
1.2
62-63-6PF 63
13
1
62-63-6PF 80
13
1
62-63-6PF 100
16
1
52
25
19.3
1.8
52
32
27.9
1.6
52
40
26
2.3
52
50
39.9
2.9
52
63
40.7
4.2
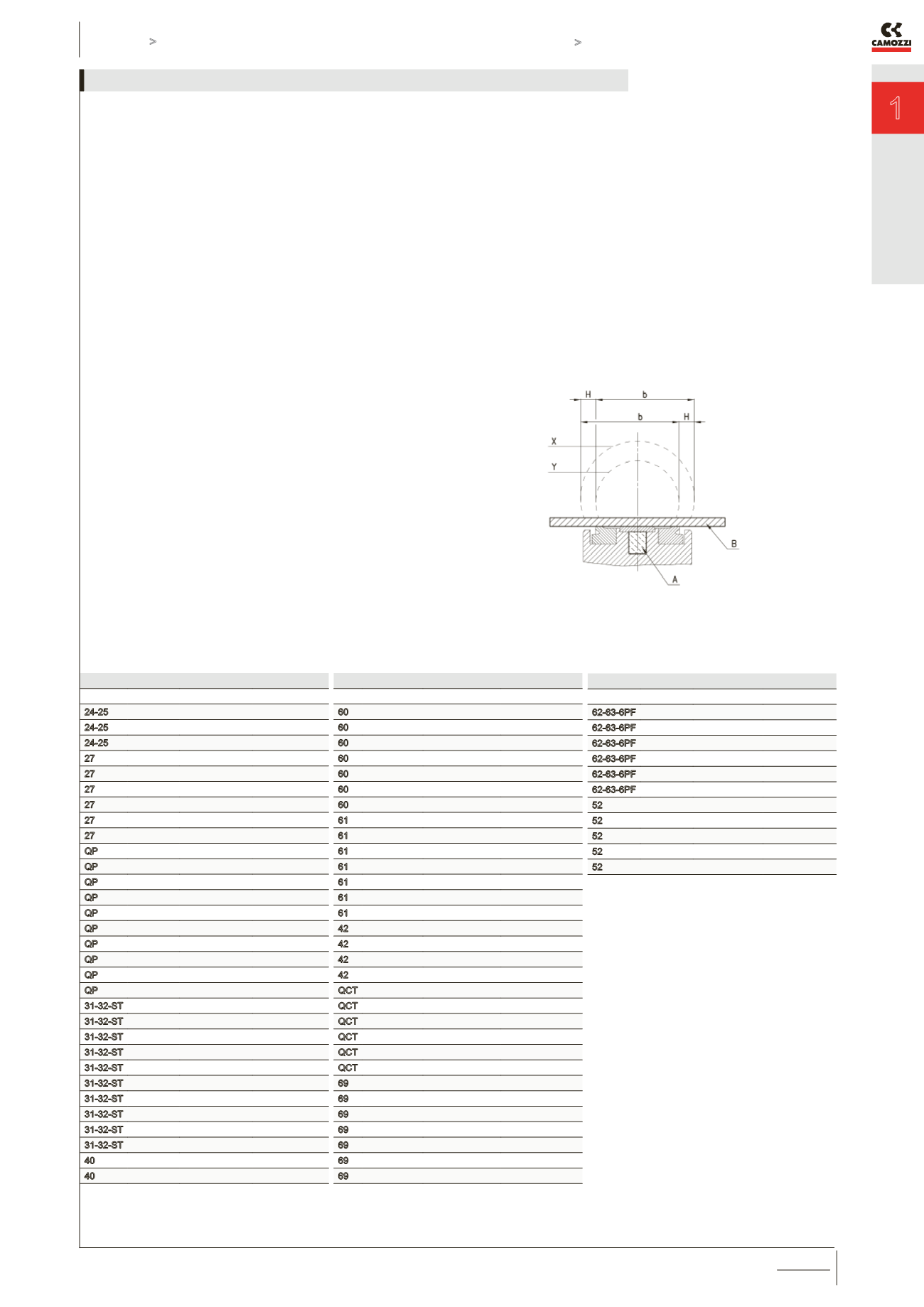
CAMPO DI FUNZIONAMENTO DEI SENSORI
RISPETTO AL PISTONE MAGNETICO (figura sotto).
La velocità massima (in m/secondo) a cui può funzionare un cilindro pilotato da
sensori magnetici è data da b/t = velocità dove:
b = corsa di contatto in mm (vedi tabella) - questa quota indica l’ampiezza del campo
magnetico o campo di commutazione in cui si ha la chiusura del circuito.
t = tempo totale di reazione in millisecondi dei componenti elettrici di comando
collegati a valle del sensore
H = valore di isteresi di funzionamento del sensore rispetto alla forma e all’ampiezza
del campo magnetico
A = magnete
B = camicia dell’attuatore
X =
Y =
Il campo di funzionamento per effetto dell’isteresi è sfasato dal valore H nel senso
opposto alla direzione di traslazione del cilindro. La velocità massima consentita
per ciascun cilindro è in funzione della quota b e del tempo di reazione dei vari
componenti collegati a valle del sensore.