















 152 / 218
152 / 218

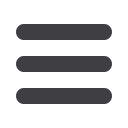
Figura 37
Relazione esistente tra
movimenti
e
segnali
:
per ottenere la corsa
A +
servono i segnali in uscita da
I.C.
e
a0
per ottenere la corsa
B +
serve il segnale in uscita da
a1
per ottenere la corsa
B –
serve il segnale in uscita da
b1
per ottenere la corsa
A –
serve il segnale in uscita da
b0
.
_
A
+
B
_
I.C.
+
a1
1
b1
b0
a0
2
3
4
1
ciclo
Fig. 37
I principi della logica
In una qualsiasi automazione pneumatica oltre alla definizione di quella che sarà la sequenza bisogna implemen-
tare tutte le informazioni che ne consentano lo svolgimento.
Per spiegare meglio il concetto utilizziamo l’esempio di una automazione atta a singolarizzare delle barre per un
successivo prelievo. Rappresentazione schematica dell’automazione.
Figura 38
Pos. 1
: l’informazione “
a
” rileva se il singolarizzatore ha caricato la barra.
Pos. 2
: l’informazione “
b
” verifica che nel magazzino ci siano barre.
Pos. 3
: l’informazione “
c
” segnala che la zona di scarico è libera.
Pos. 4
: la logica matematica presuppone due aspetti
VERO
o
FALSO
ed associa a ciascuna delle due condizioni
un valore numerico:
VERO
=
1
FALSO
=
0
Riportiamo questa logica nel nostro esempio
Informazione “
a
” Il singolarizzatore ha caricato una barra?
VERO
a
=
1
Informazione “
b
” Nel magazzino ci sono barre?
VERO
b
=
1
Informazione “
c
” La zona di scarico è libera?
VERO
c
=
1
Queste informazioni riunite ed elaborate devono dare un risultato che consenta di avere in uscita il comando
X
.
In questo caso, dovendo essere VERE tutte le informazioni la regola matematica finale e il relativo risultato sono:
X = a * b * c
X = 1
In questa condizione è possibile avere il comando
X
che abilita il movimento dell’automazione.
Pos. 5
: Una barra discende lungo lo scivolo.
5
150
CAMOZZI
>
LA TECNICA DEI CIRCUITI